OpenXR Hand Extension
openxr 관련해서 개발하면서 이번에는 hand 에 관련 된 내용을 좀 정리해 보려고 한다. openxr 에서는 일반적인 컨트롤러와는 다르게 hand는 extension으로 구현 되어 있다.
API 설명
xrCreateHandTrackerEXT 를 통해서 hand handle 을 만들고,
xrLocateHandJointsEXT 를 통해서 hand 위치를 받게 된다.
핸드 사용을 마치고 싶으면 xrDestroyHandTrackerEXT 를 호출한다.
Hand Joints
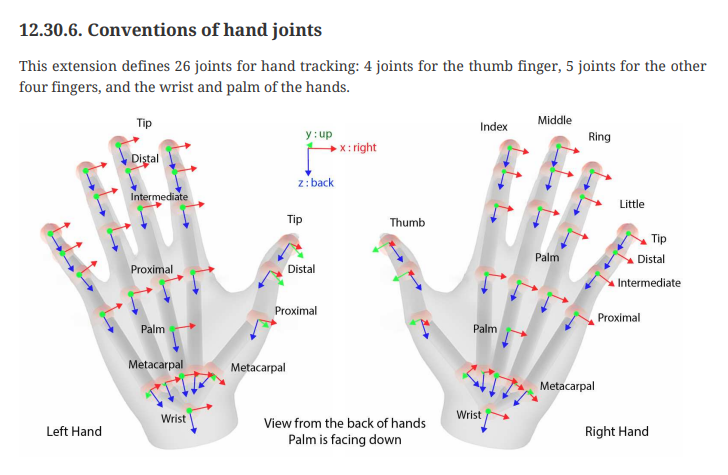
핸드는 26개의 joint로 이루어져 있으며, 아래와 같은 enum 순서로 손가락 관절의 position 값을 가져올 수 있다.
// Provided by XR_EXT_hand_tracking
typedef enum XrHandJointEXT {
XR_HAND_JOINT_PALM_EXT = 0,
XR_HAND_JOINT_WRIST_EXT = 1,
XR_HAND_JOINT_THUMB_METACARPAL_EXT = 2,
XR_HAND_JOINT_THUMB_PROXIMAL_EXT = 3,
XR_HAND_JOINT_THUMB_DISTAL_EXT = 4,
XR_HAND_JOINT_THUMB_TIP_EXT = 5,
XR_HAND_JOINT_INDEX_METACARPAL_EXT = 6,
XR_HAND_JOINT_INDEX_PROXIMAL_EXT = 7,
XR_HAND_JOINT_INDEX_INTERMEDIATE_EXT = 8,
XR_HAND_JOINT_INDEX_DISTAL_EXT = 9,
XR_HAND_JOINT_INDEX_TIP_EXT = 10,
XR_HAND_JOINT_MIDDLE_METACARPAL_EXT = 11,
XR_HAND_JOINT_MIDDLE_PROXIMAL_EXT = 12,
XR_HAND_JOINT_MIDDLE_INTERMEDIATE_EXT = 13,
XR_HAND_JOINT_MIDDLE_DISTAL_EXT = 14,
XR_HAND_JOINT_MIDDLE_TIP_EXT = 15,
XR_HAND_JOINT_RING_METACARPAL_EXT = 16,
XR_HAND_JOINT_RING_PROXIMAL_EXT = 17,
XR_HAND_JOINT_RING_INTERMEDIATE_EXT = 18,
XR_HAND_JOINT_RING_DISTAL_EXT = 19,
XR_HAND_JOINT_RING_TIP_EXT = 20,
XR_HAND_JOINT_LITTLE_METACARPAL_EXT = 21,
XR_HAND_JOINT_LITTLE_PROXIMAL_EXT = 22,
XR_HAND_JOINT_LITTLE_INTERMEDIATE_EXT = 23,
XR_HAND_JOINT_LITTLE_DISTAL_EXT = 24,
XR_HAND_JOINT_LITTLE_TIP_EXT = 25,
XR_HAND_JOINT_MAX_ENUM_EXT = 0x7FFFFFFF
} XrHandJointEXT;
위 구조체 대로 가져오면 아래의 이미지와 같은 hand bone을 만들 수 있다.
Python Code
from enum import Enum
class HandJoint(Enum):
# PALM
PALM_EXT = 0
WRIST_EXT = 1
# THUMB
THUMB_METACARPAL_EXT = 2
THUMB_PROXIMAL_EXT = 3
THUMB_DISTAL_EXT = 4
THUMB_TIP_EXT = 5
# INDEX
INDEX_METACARPAL_EXT = 6
INDEX_PROXIMAL_EXT = 7
INDEX_INTERMEDIATE_EXT = 8
INDEX_DISTAL_EXT = 9
INDEX_TIP_EXT = 10
# MIDDLE
MIDDLE_METACARPAL_EXT = 11
MIDDLE_PROXIMAL_EXT = 12
MIDDLE_INTERMEDIATE_EXT = 13
MIDDLE_DISTAL_EXT = 14
MIDDLE_TIP_EXT = 15
# RING
RING_METACARPAL_EXT = 16
RING_PROXIMAL_EXT = 17
RING_INTERMEDIATE_EXT = 18
RING_DISTAL_EXT = 19
RING_TIP_EXT = 20
# LITTLE
LITTLE_METACARPAL_EXT = 21
LITTLE_PROXIMAL_EXT = 22
LITTLE_INTERMEDIATE_EXT = 23
LITTLE_DISTAL_EXT = 24
LITTLE_TIP_EXT = 25
MAX_ENUM_EXT = 0x7FFFFFFF
hand_bone_map = [
# PALM
(HandJoint.WRIST_EXT, HandJoint.PALM_EXT),
# THUMB
(HandJoint.WRIST_EXT, HandJoint.THUMB_METACARPAL_EXT),
(HandJoint.THUMB_METACARPAL_EXT, HandJoint.THUMB_PROXIMAL_EXT),
(HandJoint.THUMB_PROXIMAL_EXT, HandJoint.THUMB_DISTAL_EXT),
(HandJoint.THUMB_DISTAL_EXT, HandJoint.THUMB_TIP_EXT),
# INDEX
(HandJoint.WRIST_EXT, HandJoint.INDEX_METACARPAL_EXT),
(HandJoint.INDEX_METACARPAL_EXT, HandJoint.INDEX_PROXIMAL_EXT),
(HandJoint.INDEX_PROXIMAL_EXT, HandJoint.INDEX_INTERMEDIATE_EXT),
(HandJoint.INDEX_INTERMEDIATE_EXT, HandJoint.INDEX_DISTAL_EXT),
(HandJoint.INDEX_DISTAL_EXT, HandJoint.INDEX_TIP_EXT),
# MIDDLE
(HandJoint.WRIST_EXT, HandJoint.MIDDLE_METACARPAL_EXT),
(HandJoint.MIDDLE_METACARPAL_EXT, HandJoint.MIDDLE_PROXIMAL_EXT),
(HandJoint.MIDDLE_PROXIMAL_EXT, HandJoint.MIDDLE_INTERMEDIATE_EXT),
(HandJoint.MIDDLE_INTERMEDIATE_EXT, HandJoint.MIDDLE_DISTAL_EXT),
(HandJoint.MIDDLE_DISTAL_EXT, HandJoint.MIDDLE_TIP_EXT),
# RING
(HandJoint.WRIST_EXT, HandJoint.RING_METACARPAL_EXT),
(HandJoint.RING_METACARPAL_EXT, HandJoint.RING_PROXIMAL_EXT),
(HandJoint.RING_PROXIMAL_EXT, HandJoint.RING_INTERMEDIATE_EXT),
(HandJoint.RING_INTERMEDIATE_EXT, HandJoint.RING_DISTAL_EXT),
(HandJoint.RING_DISTAL_EXT, HandJoint.RING_TIP_EXT),
# LITTLE
(HandJoint.WRIST_EXT, HandJoint.LITTLE_METACARPAL_EXT),
(HandJoint.LITTLE_METACARPAL_EXT, HandJoint.LITTLE_PROXIMAL_EXT),
(HandJoint.LITTLE_PROXIMAL_EXT, HandJoint.LITTLE_INTERMEDIATE_EXT),
(HandJoint.LITTLE_INTERMEDIATE_EXT, HandJoint.LITTLE_DISTAL_EXT),
(HandJoint.LITTLE_DISTAL_EXT, HandJoint.LITTLE_TIP_EXT),
]
이걸 파이썬으로 만들면 위와 같은 코드가 된다. 이걸 왜 하느냐??? 그건 blender에서 python으로 armature를 자동으로 만들어 볼려고 한다.
hand_joint_position = {
HandJoint.WRIST_EXT : (0,0,0),
HandJoint.PALM_EXT : (0,0,0),
HandJoint.THUMB_METACARPAL_EXT : (0,0,0),
HandJoint.THUMB_PROXIMAL_EXT : (0,0,0),
HandJoint.THUMB_DISTAL_EXT : (0,0,0),
HandJoint.THUMB_TIP_EXT : (0,0,0),
HandJoint.INDEX_METACARPAL_EXT : (0,0,0),
HandJoint.INDEX_PROXIMAL_EXT : (0,0,0),
HandJoint.INDEX_INTERMEDIATE_EXT : (0,0,0),
HandJoint.INDEX_DISTAL_EXT : (0,0,0),
HandJoint.INDEX_TIP_EXT : (0,0,0),
HandJoint.MIDDLE_METACARPAL_EXT : (0,0,0),
HandJoint.MIDDLE_PROXIMAL_EXT : (0,0,0),
HandJoint.MIDDLE_INTERMEDIATE_EXT : (0,0,0),
HandJoint.MIDDLE_DISTAL_EXT : (0,0,0),
HandJoint.MIDDLE_TIP_EXT : (0,0,0),
HandJoint.RING_METACARPAL_EXT : (0,0,0),
HandJoint.RING_PROXIMAL_EXT : (0,0,0),
HandJoint.RING_INTERMEDIATE_EXT : (0,0,0),
HandJoint.RING_DISTAL_EXT : (0,0,0),
HandJoint.RING_TIP_EXT : (0,0,0),
HandJoint.LITTLE_METACARPAL_EXT : (0,0,0),
HandJoint.LITTLE_PROXIMAL_EXT : (0,0,0),
HandJoint.LITTLE_INTERMEDIATE_EXT : (0,0,0),
HandJoint.LITTLE_DISTAL_EXT : (0,0,0),
HandJoint.LITTLE_TIP_EXT : (0,0,0),
}
이런 형식으로 hand position 데이터를 생성한 후, (물론 값은 0,0,0 아니라 실제 값이어야 한다.)
Blender code
- Blender Armature Script Link (https://docs.blender.org/api/current/bpy.ops.armature.html)
- Blender Object Script Link (https://docs.blender.org/api/current/bpy.ops.object.html)
import bpy
_armature = None
_ebs = None
def init():
_armature = bpy.context.active_object
_ebs = _armature.data.edit_bones
# 새로운 Armature 생성
bpy.ops.object.armature_add(radius=1.0, enter_editmode=False, align='WORLD', location=(0.0, 0.0, 0.0), rotation=(0.0, 0.0, 0.0), scale=(0.0, 0.0, 0.0))
# 우선 Edit 모드로 변경
bpy.ops.object.mode_set(mode='EDIT', toggle=False)
def create_bone(name, head, tail):
eb = _ebs.new(name)
eb.head = head
eb.tail = tail
return eb
def link(parent, child):
parent = _armature.data.edit_bones[parent]
child = _armature.data.edit_bones[child]
child.parent = parent
child.use_connect = True
def create_bones():
for joint in range(0,len(hand_bone_map)):
j = hand_bone_map[joint]
parent = j[0]
child = j[1]
parent_pos = hand_joint_position[parent]
child_pos = hand_joint_position[child]
print(child.name, parent_pos, child_pos)
create_bone(child.name, parent_pos, child_pos)
link(parent.name, child.name)
init()
create_bones()
이렇게 코드를 작성하고 blender 상에서 python script를 실행하면,
hand bone을 생성 할 수 있고,
hand mesh를 만들고 armature와
armature deform에서 with automatic weights로 bone을 연결해서,
asset을 만들고, 이를 openxr hand tracking api 과 연결하면 hand가 움직이는 걸 볼 수 있다.