VR에서의 SLAM
- Head Tracking을 하기 위해서는 VO, SLAM이 필요하다.
- GearVR이나 Daydream 같은 경우엔 자이로센서와 가속도 센서로 3DoF만 구현했기 때문에 SLAM이 필요 없는데,
- Oculus나 Vive 같은 경우엔 6DoF를 필요로 하기 때문에 SLAM을 필요로 한다.
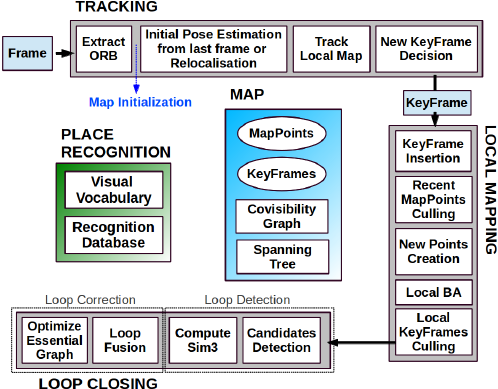
ORB_SLAM
- ORB SLAM 은 Feature Detecting을 ORB를 통해서 찾고 Feature Matching을 해서 Trajectory를 찾는다.
ORB SLAM repo
Build
- dependency
- opencv install
- 여기서 opencv는 3.4 버전으로 설치했다.
- Pangolin link
- libeigen3-dev, libgtk2.0-dev 를 설치해 준다.
- build
- C++11대신에 C++14를 사용하기 위해서 아래의 명령 실행
- sed -i ‘s/++11/++14/g’ CMakeLists.txt
- CMakeList.txt 에서 아래와 같이 수정
- find_package(Eigen3 3.3.7 REQUIRED NO_MODULE)
- 코드 버그 수정
- include/LoopClosing.h
-Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose; +Eigen::aligned_allocator<std::pair<KeyFrame* const, g2o::Sim3> > > KeyFrameAndPose;- include/System.h 에 아래의 include 추가
+#include+#include +#include </code></pre> - 빌드 실행
cd ORB_SLAM2 chmod +x build.sh ./build.sh
- C++11대신에 C++14를 사용하기 위해서 아래의 명령 실행
Run
- https://vision.in.tum.de/data/datasets/rgbd-dataset/download 여기서 dataset을 다운로드 받고
- ./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER 이런식을 실행하면 동작함.
Profile
- Raspberry Pi 4에서 Mono로 돌렸을 때 몇 frame이 나오는지 궁금하다.
- ORB SLAM의 경우엔 연산량이 많아서 무겁다고 해서 VO정도의 기능이 있는 SVO와 비교해 보고 싶다.